
Temperature Controller Basics Handbook
Temperature Controller Basics Handbook, courtesy of Danaher Industrial Controls Group - Process Automation, Measurement, & Sensing
Why do we need temperature controllers?
Temperature controllers are needed in any situation requiring a given temperature be kept stable. This can be in a situation where an object is required to be heated, cooled or both and to remain at the target temperature (setpoint), regardless of the changing environment around it. There are two fundamental types of temperature control; open loop and closed loop control. Open loop is the most basic form and applies continuous heating/cooling with no regard for the actual temperature output. It is analogous to the internal heating system in a car. On a cold day, you may need to turn the heat on to full to warm the car to 75°. However, during warmer weather, the same setting would leave the inside of the car much warmer than the desired 75°.
Open loop control block diagram
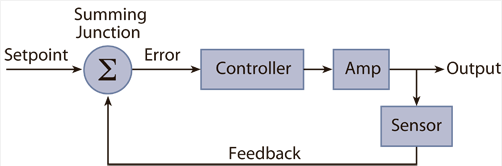
Closed loop control is far more sophisticated than open loop. In a closed loop application, the output temperature is constantly measured and adjusted to maintain a constant output at the desired temperature. Closed loop control is always conscious of the output signal and will feed this back into the control process. Closed loop control is analogous to a car with internal climate control. If you set the car temperature to 75°, the climate control will automatically adjust the heating (during cold days) or cooling (during warm days) as required to maintain the target temperature of 75°.
Closed loop control block diagram
Introduction to Temperature Controllers
A temperature controller is a device used to hold a desired temperature at a specified value.
The simplest example of a temperature controller is a common thermostat found in homes. For instance, a hot water heater uses a thermostat to control the temperature of the water and maintain it at a certain commanded temperature. Temperature controllers are also used in ovens. When a temperature is set for an oven, a controller monitors the actual temperature inside of the oven. If it falls below the set temperature, it sends a signal to activate the heater to raise the temperature back to the setpoint. Thermostats are also used in refrigerators. So if the temperature gets too high, a controller initiates an action to bring the temperature down.
Common Controller Applications
Temperature controllers in industry work much the same way they do in common household applications. A basic temperature controller provides control of industrial or laboratory heating and cooling processes. In a typical application, sensors measure the actual temperature. This sensed temperature is constantly compared to a user setpoint. When the actual temperature deviates from the setpoint, the controller generates an output signal to activate other temperature regulating devices such as heating elements or refrigeration components to bring the temperature back to the setpoint.
Common Uses in Industry
Temperature controllers are used in a wide variety of industries to manage manufacturing processes or operations. Some common uses for temperature controllers in industry include plastic extrusion and injection molding machines, thermo-forming machines, packaging machines, food processing, food storage, and blood banks. The following is a brief overview of some common temperature control applications in industry:
- Heat Treat/Oven
Temperature controllers are used in ovens and in heat-treating applications within furnaces, ceramic kilns, boilers, and heat exchangers.
- Packaging
In the packaging world, machinery equipped with seal bars, glue applicators, hot melt functions, shrink wrap tunnels or label applicators must operate at designated temperatures and process time lengths. Temperature controllers precisely regulate these operations to ensure a high quality product output.
- Plastics
Temperature control in the plastics industry is common on portable chillers, hoppers and dryers and molding and extruding equipment. In extruding equipment, temperature controllers are used to precisely monitor and control temperatures at different critical points in the production of plastic.
- Healthcare
Temperature controllers are used in the healthcare industry to increase the accuracy of temperature control. Common equipment using temperature controllers includes laboratory and test equipment, autoclaves, incubators, refrigeration equipment, and crystallization growing chambers and test chambers where specimens must be kept or tests must be run within specific temperature parameters.
Parts of a Temperature Controller
All controllers have several common parts. For starters, controllers have inputs. The inputs are used to measure a variable in the process being controlled. In the case of a temperature controller, the measured variable is temperature.
Inputs
Temperature controllers can have several types of inputs. The type of input sensor and signal needed may vary depending on the type of controlled process. Typical input sensors include thermocouples and resistive thermal devices (RTD's), and linear inputs such as mV and mA. Typical standardized thermocouple types include J, K, T, R, S, B and L types among others.
Controllers can also be set to accept an RTD as a temperature sensing input. A typical RTD would be a 100Ω platinum sensor.
Alternatively, controllers can be set to accept voltage or current signals in the millivolt, volt, or milliamp range from other types of sensors such as pressure, level, or flow sensors. Typical input voltage signals include 0 to 5VDC, 1 to 5VDC, 0 to 10VDC and 2 to 10VDC. Controllers may also be set up to accept millivolt signals from sensors that include 0 to 50mVDC and 10 to 50mVDC. Controllers can also accept milliamp signals such as 0 to 20mA or 4 to 20mA.
A controller will typically incorporate a feature to detect when an input sensor is faulty or absent. This is known as a sensor break detect. Undetected, this fault condition could cause significant damage to the equipment being controlled. This feature enables the controller to stop the process immediately if a sensor break condition is detected.
Outputs
In addition to inputs, every controller also has an output. Each output can be used to do several things including control a process (such as turning on a heating or cooling source), initiate an alarm, or to retransmit the process value to a programmable logic controller (PLC) or recorder.
Typical outputs provided with temperature controllers include relay outputs, solid state relay (SSR) drivers, triac, and linear analog outputs. A relay output is usually a single-pole double-throw (SPDT) relay with a DC voltage coil. The controller energizes the relay coil, providing isolation for the contacts. This lets the contacts control an external voltage source to power the coil of a much larger heating contactor. It's important to note that the current rating of the relay contacts is usually less than 2A. The contacts can control a heating contactor with a rating of 10–20A used by the heater bands or heating elements.
Another type of output is an SSR driver. SSR driver outputs are logic outputs that turn a solid-state relay on or off. Most solid-state relays require 3 to 32VDC to turn on. A typical SSR driver turn-on signal of 10V can drive three solid-state relays.
A triac provides the relay function without any moving parts. It is a solid state device that controls currents up to 1A. Triac outputs may allow some small amount of bleed current, usually less than 50mA. This bleed current doesn't affect heating contactor circuits, but it may be a problem if the output is used to connect to another solid-state circuit such as a PLC input. If this is a concern, a standard relay contact would be a better choice. It provides absolute zero current when the output is de-energized and the contacts are open.
Analog outputs are provided on some controllers which put out a 0–10V signal or a 4–20mA signal. These signals are calibrated so that the signal changes as a percentage of the output. For example, if a controller is sending a 0% signal, the analog output will be 0V or 4mA. When the controller is sending a 50% signal, the output will be 5V or 12mA. When the controller is sending a 100% signal, the output will be 10V or 20mA.
Other Parameters
Temperature controllers have several other parameters, one of which is a setpoint. Basically, a setpoint is a target value set by an operator which the controller aims at keeping steady. For instance, a setpoint temperature of 30°C means that a controller will aim to keep the temperature at this value.
Another parameter is an alarm value. This is used to indicate when a process has reached some given condition. There are several variations on types of alarms. For instance, a high alarm may indicate that a temperature has gotten hotter than some set value. Likewise, a low alarm indicates the temperature has dropped below some set value.
For example, in a temperature control system, a high fixed alarm prevents a heat source from damaging equipment by de-energizing the source if the temperature exceeds some setpoint value. A low fixed alarm, on the other hand, may be set if a low temperature could damage equipment by freezing.
The controller can also test for a broken output device, such as an open heating element, by checking the amount of output signal and comparing it to the amount of detected change in the input signal. For example, if the output signal is 100% and the input sensor does not detect any change in temperature after a certain time period, the controller will determine that the loop is broken. This feature is known as Loop Alarm.
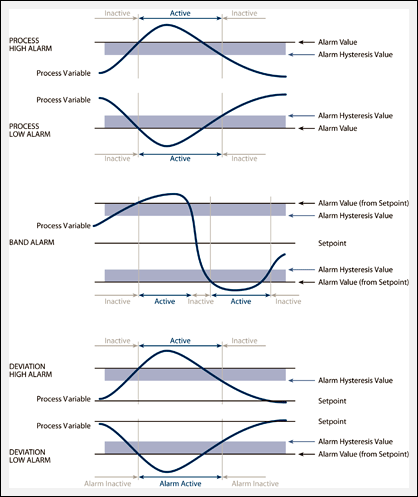
Controller Alarm Comparison
Another type of alarm is a deviation alarm. This is set at some plus-or-minus value from the setpoint. The deviation alarm monitors the process setpoint. The operator is notified when the process begins to vary some preprogrammed amount from the setpoint. A variation on the deviation alarm is the band alarm. This alarm will activate either within or outside a designated temperature band. Typically, the alarm points are half above and half below the controller setpoint.
For example, if the setpoint is 150° and the deviation alarms are set at ±10°, the alarms would be activated when the temperature reached 160° at the high end or 140° at the low end. If the setpoint is changed to 170°, the high alarm would activate at 180° and the low alarm at 160°. Another common set of controller parameters are PID parameters. PID, which stands for proportional, integral, derivative, is an advanced control function that uses feedback from the controlled process to determine how best to control that process.
How it Works
All controllers, from the basic to the most complex, work pretty much the same way. Controllers control, or hold, some variable or parameter at a set value. There are two variables required by the controller; actual input signal and desired setpoint value. The input signal is also known as the process value. The input to the controller is sampled many times per second, depending on the controller.
This input, or process, value is then compared with the setpoint value. If the actual value doesn't match the setpoint, the controller generates an output signal change based on the difference between the setpoint and the process value and whether or not the process value is approaching the setpoint or deviating farther from the setpoint. This output signal then initiates some type of response to correct the actual value so that it matches the setpoint. Usually, the control algorithm updates the output power value which is then applied to the output.
The control action taken depends on the type of controller. For instance, if the controller is an ON/OFF control, the controller decides if the output needs to be turned on, turned off, or left in its present state.
ON/OFF control is one of the simplest types of control to implement. It works by setting up a hysteresis band. For instance, a temperature controller may be set to control the temperature inside of a room. If the setpoint is 68° and the actual temperature falls to 67°, an error signal would show a –1° difference. The controller would then send a signal to increase the applied heat to raise the temperature back to the setpoint of 68°. Once the temperature reaches 68°, the heater shuts off. For a temperature between 68° and 67°, the controller takes no action and the heater remains off. However, once the temperature reaches 67°, the heater will again kick in.
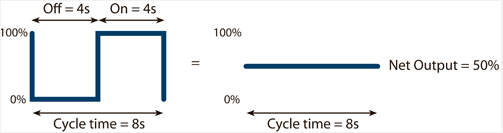
Unlike ON/OFF control, PID control determines the exact output value required to maintain the desired temperature. The output power can range from 0 to 100%. When an analog output type is used, the output drive is proportional to the output power value. However, if the output is a binary output type such as a relay, SSR driver, or triac, then the output must be time proportioned to obtain an analog representation.
A time proportioned system uses a cycle time to proportion the output value. If the cycle time is set to 8 seconds, a system calling for 50% power will have the output on for 4 seconds and off for 4 seconds. As long as the power value doesn't change, the time values wouldn't change. Over time, the power is averaged to the 50% commanded value, half on and half off. If the output power needed to be 25%, then for the same 8 second cycle time, the output would be on for 2 seconds and off for 6 seconds.
Output time proportion example
All things being equal, a shorter cycle time is desirable because the controller can more quickly react and change the state of the output for given changes on the process. Due to the mechanics of a relay, a shorter cycle time can shorten the life of a relay, and is not recommend to be less than 8 seconds. For solid state switching devices like an SSR driver or triac, faster switching times are better. Longer switching times, no matter what output type, allow for more oscillation in the process value. The general rule is that, ONLY if the process will allow it, when a relay output is used, a longer cycle time is desired.
Additional Features
Controllers can also have a number of additional optional features. One of these is communication capability. A communication link lets the controller communicate with a PLC or a computer. This allows data exchange between the controller and the host. An example of typical data exchange would be the host computer or PLC reading the process value.
A second option is a remote setpoint. This feature allows a remote device, such as a PLC or computer, to change the controller setpoint. However, unlike the communication capability mentioned above, the remote setpoint input uses a linear analog input signal that is proportional to the setpoint value. This gives an operator added flexibility by being able to change the setpoint from a remote location. A typical signal might be 4–20mA or 0–10VDC.
Another common feature supplied with controllers is the ability to configure them using special software on a PC connected via a communications link. This allows quick and easy configuration of the controller and also the option to save configurations for future use.
Another common feature is a digital input. The digital input can work together with a remote setpoint to select the local or remote setpoint for the controller. It can also be used to select between setpoint 1 and setpoint 2 as programmed in the controller. Digital inputs can also remotely reset a limit device if it has gone into the limit condition.
Other optional features include a transmitter power supply used to power a 4–20mA sensor. This power supply is used to supply 24VDC power at a maximum of 40mA.
In some applications, a dual-color display can also be a desirable feature, making it easy to identify different controller states. Some products also have displays that can change from red to green or vice versa depending on preprogrammed conditions, such as indicating an alarm condition. In this case, no alarm might be shown by a green display, but if an alarm is present the display would turn red.
Types of Controllers
Temperature controllers come in many different styles with a vast array of features and capabilities. There are also plenty of ways to categorize controllers according to their functional capabilities. In general, temperature controllers are either single loop or multi-loop. Single loop controllers have one input and one or more outputs to control a thermal system. On the other hand, multi-loop controllers have multiple inputs and outputs, and are capable of controlling several loops in a process. More control loops permit controlling more process system functions.
Reliable single loop controllers range from basic devices that require single manual setpoint changes to sophisticated profilers that can automatically execute up to eight setpoint changes over a given time period.
Analog
The simplest, most basic controller type is the analog controller. Analog controllers are low cost, simple controllers that are versatile enough for rugged, reliable process control in harsh industrial environments including those with significant electrical noise. Controller display is typically a knob dial.

Basic analog controllers are used mostly in non-critical or unsophisticated thermal systems to provide simple ON-OFF temperature control for direct or reverse acting applications. Basic controllers accept thermocouple or RTD inputs and offer optional percent power control mode for systems without temperature sensors. Their basic drawback is a lack of readable display and lack of sophistication for more challenging control tasks. Plus, the absence of any communication ability limits their use to simple applications such as ON/OFF switching of heating elements or cooling devices.
Limit
These controllers provide safety limit control over process temperature. They have no ability to control temperature on their own. Put simply, limit controllers are independent safety devices to be used alongside an existing control loop. They are capable of accepting thermocouple, RTD, or process inputs with limits set for high or low temperature just like a regular controller. Limit control is latching and part of redundant control circuitry to positively shut a thermal system down in case of an over-limit condition. The latching limit output must be reset by an operator; it will not reset by itself once the limit condition does not exist. A typical example would be a safety shut off for a furnace. If the furnace exceeds some set temperature, the limit device would shut the system down. This is to prevent damage to the furnace and possibly any product that may be damaged by excessive temperatures.
General Purpose Temperature Controllers
General-purpose temperature controllers are used to control most typical processes in industry. Typically, they come in a range of DIN sizes, have multiple outputs, and programmable output functions. These controllers can also perform PID control for excellent general control situations. They are traditionally placed in the front panel with the display for easy operator accessibility.

Most modern digital temperature controllers can automatically calculate PID parameters for optimum thermal system performance using their built in auto-tuning algorithms. These controllers have a pre-tune function to initially calculate the PID parameters for a process, and a continuous tune function to constantly refine the PID parameters. This allows for quick setup, saving time and reducing waste.
Valve Motor Drive
A special type of general-purpose controller is the valve motor drive (VMD) controller. These controllers are specifically designed to control valve motors used in manufacturing applications such as gas burner control on a production line. Special tuning algorithms give accurate control and fast output reaction without the need for slidewire feedback or excessive knowledge of three-term PID tuning algorithms. VMD controllers control the position of the valve, somewhere between 0% to 100% open, depending on the energy needs of the process at any given time.
Profile
Profiling controllers, also called ramp-soak controllers, allow operators to program a number of setpoints and the time to sit at each setpoint. Programming a setpoint change is called ramp and the time to stay at each setpoint is called soak or dwell. One ramp or one soak is considered to be one segment. A profiler offers the ability to enter a number of segments to allow complex temperature profiles. The profiles can be referred to as recipes by the operator. Most profilers allow storage of multiple recipes for later use. Smaller profilers may allow for four recipes with sixteen segments each with more advanced profilers allowing for more recipes and segments.
Profile controllers are able to execute ramp-and-soak profiles such as temperature changes over time, along with hold and soak/cycle duration, all the while being unattended by an operator.
Typical applications for profile controllers include heat treating, annealing, environmental chambers, and complex process furnaces.
Multi-Loop
Besides single-loop controllers which can control only one process loop, multi-loop controllers can control more than one loop, meaning they can accept more than one input variable.
Generally speaking, a multi-loop controller can be thought of as a device with many individual temperature controllers inside a single chassis. These are typically mounted behind the panel as opposed to in front of the panel as with general-purpose single loop controllers. Programming any one of the loops is similar to programming a panel-mounted temperature controller. However, multi-loop systems tend not to have the traditional, physical user interface (no display or switches), instead using a dedicated communications link.
Multi-loop controllers need to be configured by a specialized software program on a PC that can download the configuration to the controller using the dedicated communications interface.
Information can be retrieved via a communications interface. Common communications interfaces that are supported include DeviceNet, Profibus, MODBUS/RTU, CanOPEN, Ethernet/IP, and MODBUS/TCP.
Multi-loop controllers provide a compact modular system that can operate either within a stand-alone system or in a PLC environment. As a replacement for temperature controls in PLCs, they provide fast PID control and off-load much of the math intensive work from the PLC processor, allowing for faster PLC scan rates. As a replacement for multiple DIN controllers, they provide a single point of software access to all control loops. The cost of installation is reduced by eliminating much wiring, panel cutouts, and saving panel space.
Multi-loop controllers provide some additional features not available on traditional panel mounted controllers. For instance, multi-loop controllers have higher loop density for a given space. Some multi-loop temperature control systems can have up to 32 loops of control in a DIN rail mounted package not much longer than 8". They also reduce wiring by having a common connection point for power supply and communications interfaces.
Multi-loop temperature controllers also have enhanced security features, one of which is the absence of buttons where anyone can change critical settings. By having complete control over the information being read from or written to the controller, the machine builder can limit the information that any given operator can read or change, preventing undesirable conditions from occurring, such as setting a setpoint too high to a range that may damage product or the machine. In addition, controller modules can be hot-swapped. This lets a controller module be changed out without having to power down the system. Modules can also auto-configure after a hot swap.
Other Temperature Controller Characteristics
Supply Voltage
There are typically two supply voltage options when it comes to temperature controllers: low voltage (24VAC/DC) and high voltage (110-230VAC).
Size
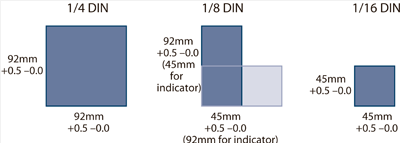
Controllers come in several standard sizes that are referred to by DIN numbers such as 1/4 DIN, 1/8 DIN, 1/16 DIN and 1/32 DIN. DIN is an acronym for the roughly translated "Deutsche Institut fur Normung," a German standards and measurements organization. For our purposes, DIN simply indicates that a device complies with a generally accepted standard for panel dimensions.
DIN size comparison
DIN Size | 1/4 | 1/8 | 1/16 | 1/32 |
|---|---|---|---|---|
Size in mm | 92 x 92 | 92 x 45 | 45 x 45 | 49 x 25 |
Size in inches | 3.62 x 3.62 | 3.62 x 1.77 | 1.77 x 1.77 | 1.93 x 0.98 |
The smallest size is the 1/32 DIN, which is 24mm × 48mm, with a corresponding panel cutout of 22.5mm × 45mm. The next size up is the 1/16 DIN which measures 48mm × 48mm with a panel cutout size of 45mm × 45mm. The 1/8 DIN is 48mm × 96mm with a 45mm × 92mm panel cutout. Lastly, the largest size is the 1/4 DIN measuring 96mm × 96mm with a 92mm × 92mm panel cutout.
It is important to note that the DIN standards do not determine how deep a controller may be behind a panel. The standards only allow for front panel dimensions and panel cut-out dimensions.
Agency Approvals
It is desirable for a temperature controller to have some sort of agency approval to ensure that the controller meets a minimum set of safety standards. The type of approval depends on the country in which the controller will be used. The most common approval, UL and cUL registration, applies to all controllers used in the U.S. and Canada. Usually, there is one certification required for each country.
For controllers that are used in European Union countries, CE approval is necessary.
A third type of approval is FM. This applies only to limit devices and for controllers in the U.S. and Canada.
Front Panel Enclosure Rating
An important controller characteristic is the front panel enclosure rating. These ratings can be in the form of an IP rating or a NEMA rating. IP (Ingress Protection) ratings apply to all controllers and are usually IP65 or higher. This means that from the front panel only, the controller is completely protected from dust and against low pressure jets of water from all directions with only limited ingress permitted. IP ratings are used in the U.S., Canada, and Europe.
A controller's NEMA (National Electrical Manufacturers Association) rating is parallel to the IP rating. Most controllers have a NEMA 4 or 4X rating, which means they can be used in applications requiring water washdown only (not oils or solvents). The ‘X' in a NEMA 4X rating means that the front panel won't corrode. NEMA ratings are used primarily in the U.S. and Canada.